
应急救援机器人
项目特点
1、项目主要特点:
1)轻量化:装备总质量3000kg和4500kg,适合我国普遍装备的米171和直八8外挂运输。
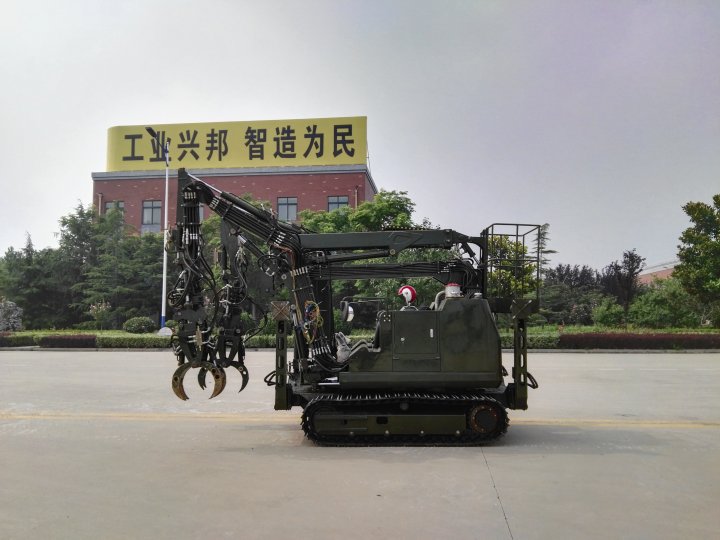
2)多功能:前双臂、后折臂结构(J3为多级伸缩复合折臂),还有多个液压输出接口,可连接发电机、空压机、制氧机、水泵、各种手动液压工具设备和照明、充电。同时具备搜索和救援功能,配备多种辅具,具备远距离大范围扫描式搜索和几乎所有救援机械所具备的挖掘、破碎、剪切、扩张、锯断、抓装、叉装、吊运、举升、推拉、支撑、高空作业等功能,单机可替代20名义上人工作业。
3)高机动越野和作业稳定性:增压柴油发动机、履带底盘、四只蛙式支腿,可在高原、非公路环境(涉水、泥泞、废墟、洼地、坡道等)行走和平稳作业。
4)智能化控制和高效通讯:机器人采用液压驱动方式,其控制系统建立在电液比例系统建模、工作臂的运动分析等基础上,并基于CAN总线的电液比例控制技术进行开发。配备无线遥控模块,使机器人具有简单化的操作和遥控操作功能。此外,控制系统具备高可靠性和鲁棒性等特点,确保机器人救援过程中的安全性。各作业臂末端、车身、高空作业栏、支腿等部位装有多个相机和传感器,搜索臂末端配备麦克、扩音器、ccd相机、生命探测仪、照明灯等,可实现操作人员、救援装备、救援人员、遇难者及多救援装备间的无线通讯。
5)模块化设计:为降低装备总质量,满足直升机外挂载荷需求和实现装备多功能快速转换,项目支腿、机械臂、辅具等采用模块化设计。
6)装备MTBF达到1500小时以上。
2、项目突破的关键技术及主要的创新点:
1)多功能搜寻、救援装备创新结构设计;
2)关键部件轻量化设计与制造;
3)整机运动学、动力学及结构稳定性分析技术;
4)多机电系统的总线管理技术;
5)抢险救援装备控制系统的机电液联合仿真技术;
6)多功能救援装备的智能化控制;




LBJ45-1型应急救援机器人主要性能参数
| 项 目 | 单位 | 技术参数值 | ||
| 产品型号 | LBJ45-1 | |||
| 运输质量(不含驾驶员、辅具) | kg | 4500 | ||
| 最大牵引力 | kN | 20.58 | ||
| 最高行走速度 | Km/h | 2.1 | ||
| 回转速度 | rpm | 3 | ||
| 最大爬坡度 | % | 本机30、借助前臂45 | ||
| 最小离地高度 | mm | 280 | ||
| 履带宽度 | mm | 300 | ||
| 接地比压 | Mpa | 0.045 | ||
| 单臂最大抓举力矩 | KN.m | 10.5 | ||
| 抓具最大开度 | mm | 447 | ||
| 双臂最大抓举力矩 | KN.m | 14 | ||
| 前臂最大卸载距离 | mm | 3460 | ||
| 前臂最大外回转角度 | ° | 左、右90 | ||
| 前臂最大抓举深度 | mm | 885 | ||
| 前臂最大抓举高度 | mm | 6000 | ||
| 履带内侧宽度(可加宽) | mm | 1000 | ||
| 起重臂额定起重力矩 | N.m | 14.7 | ||
| 起重臂最大作业高度 | mm | 7500 | ||
| 起重臂最大作业幅度 | ° | 66 | ||
| 高空作业平台最大载荷 | kg | 100 | ||
| 高空作业平台最大作业高度 | mm | 6500 | ||
| 高空作业平台最大作业半径 | mm | 1500 | ||
| 破碎锤型号 | SB20S-200-140-35 | |||
| 破碎锤钎杆直径 | mm | 45 | ||
| 最大破碎力 | Kg/cm | 90-120 | ||
| 液压扩张钳最大剪切力力矩(单缸/双缸) | kn | 11.7/15.2 | ||
| 液压扩张钳最大扩张力力矩(单缸/双缸) | kn | 6.19/8.0 | ||
| 液压扩张钳最大剪切开度 | mm | 400 | ||
| 液压扩张钳最大扩张开度 | mm | 双缸450/单缸405 | ||
| 发动机品牌型号 | 洋马4TNV88-BSBKC | |||
| 发动机功率/转速 | 25.2KW/2200rpm | |||
| 发动机扭矩/转速 | 130-141.7N.m/1320rpm | |||
| 燃油箱容量 | L | 61 | ||
| 液压油箱容量 | L | 80 | ||
| 液压泵型号 | A10V063LR8DS | |||
| 液压系统设定压力 | Mpa | 21 | ||
| 液压系统工作压力 | Mpa | 18 | ||
| 液压系统最大流量 | L/min | 50 | ||
| 主回转马达 | BM3-400 | |||
| 起重举升回转马达 | BM1-200 | |||
| 起升马达 | BM5-160 | |||
| 行走马达 | MAG-27VP-320E | |||
| 外接油口路数 | 6 | |||
| 外界油口规格 | M22*1.5H 4个M18*1.5H 2个 | |||
| 外界油口压力 | 21MPa | |||
| 外界油口流量 | 21MPa | |||
| 外界油口最大输出功率 | 10KW | |||
| 控制单元形式 | 便携式控制器 | |||
| 信号模式 | 数字式 | |||
| 控制模式 | 有线/无线 | |||
| 高空作业平台调平精度 | ±° | 2 | ||
| 有效遥控距离 | m | 150-300 | ||
| 电气系统电压 | V | 12 | ||
| 控制系统电压 | V | 12 | ||
| 最大运输尺寸(不含属具) | 长 | mm | 4740 | |
| 宽 | mm | 1835 | ||
| 高 | mm | 1960 | ||
| 工作状态 外形尺寸 | 长 | mm | 3880 | |
| 宽 | mm | 1835 | ||
| 高 | mm | 2860 | ||
| 整机工作重量(含一名驾驶员、属具) | Kg | 4770 |
| |






- 上一条:没有了!
- 下一条:大型光伏电站智能清洗机